| Lecture: | 10 |
| Objective: | Convert between real time and timer counts and prescalers. |
| Handout: | timer math timer math solutions |
Timer prescaler
The PIC has 7 total timers that all operate on the same principles as timer 0. The "even" timers, TMR2, TMR4, TMR6 are 8-bits wide, meaning that they count-up from 0 to 255 and then roll-over. All the timers have different prescalers which we will learn more about in this lecture.| Timer | Width | Prescaler | Associate module |
| TMR0 | 8 or 16-bit | 1:1 to 1:256 | |
| TMR1 | 16-bit | 1:1, 1:4, 1:8, 1:16 | Capture Compare |
| TMR2 | 8-bit | 1:1, 1:4, 1:16 | PWM |
| TMR3 | 16-bit | 1:1, 1:4, 1:8, 1:16 | Capture Compare |
| TMR4 | 8-bit | 1:1, 1:4, 1:16 | PWM |
| TMR5 | 16-bit | 1:1, 1:4, 1:8, 1:16 | Capture Compare |
| TMR6 | 8-bit | 1:1, 1:4, 1:16 | PWM |
Prescaler
A prescaler is a piece of logic that sits between the bus clock and the timer clock.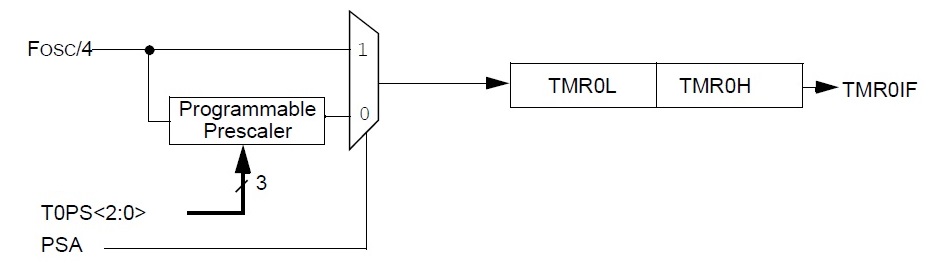
The timer subsystem, adapted from Figure 11-1 on page 155 of the PIC18(L)F2X/4XK22 Data Sheet.
The prescaler accumulates a prescribed number of bus clocks before issuing a clock tick to the timer. In order to use the prescaler, the prescaler assignment bit in the T0CON must be cleared. In other words, if you want to use a prescaler to slow down the counting rate if TMR0, then the following line of code or its equivlent must appear in your code. T0CONbits.PSA=0;
The value of the prescaler is contained inside the Timer 0 Control register T0CON in your code. Three bits in this register, T0PS2, T0PS1, T0PS0, collectively referred to as PR, control which prescaler is selected. The following table taken from page 154 of the PIC18(L)F2X/4XK22 Data Sheet describes the relationship between the prescaler bits and the prescaler applied to the bus clock before it's sent to the counter.
| T0PS | T0PS2 | T0PS1 | T0PS0 | Timer clock | Max period |
| 0b000 | 0 | 0 | 0 | 1:2 | 8.19ms |
| 0b001 | 0 | 0 | 1 | 1:4 | 16.4ms |
| 0b010 | 0 | 1 | 0 | 1:8 | 32.8ms |
| 0b011 | 0 | 1 | 1 | 1:16 | 65.5ms |
| 0b100 | 1 | 0 | 0 | 1:32 | 131ms |
| 0b101 | 1 | 0 | 1 | 1:64 | 262ms |
| 0b110 | 1 | 1 | 0 | 1:128 | 524ms |
| 0b111 | 1 | 1 | 1 | 1:256 | 1,049ms |
- T0CONbits.T0PS2 =0;
T0CONbits.T0PS1 =1;
T0CONbits.T0PS0 =1; - T0CONbits.T0PS = 0b011;
- T0CON = 0b10000011;
To put this discussion in concrete terms, if you make the assignment T0CONbits.T0PS = 0b011; in your code, then the 16-bit timer counter will count up once every 16 Fosc/4 cycles. In other words (see the work below) the counter will increment once every microsecond.
1 second 10^6 us 16 clk 1 us
------------ * -------- * ------- = -----
16*10^6 clks 1 second 1 count count
I will sometimes use the expression 1:16 to describe when Fosc
is being divided by 16. I find it easy to visualize this
by thinking of the ' : ' as a ratio symbol that tells me how many
Fosc/4 clock cycles it takes to increment the timer.
Time ranges
To see how a prescaler affects the upper-bound of the timer, let's revisit the following code-snippet from the last lecture.T0CONbits.PSA = 0; // Turn on prescaler T0CONbits.T0PS = 0b011; // configure 1:16 prescaler T0CONbits.TMR0ON = 1; // Turn on timer 0 INTCONbits.T0IF = 0; // Clear roll-over flag while(INTCONbits.T0IF == 0); // Wait for roll-over flag to be set by counterYour question is to calculate how long (in milliseconds) the while(INTCONbits.T0IF == 0); statement takes to execute, assuming that the counter starts at 0. In other words, I am asking how long it takes for the counter to roll-over. You will need to use dimensional analysis to prove that your conversion is correct. Like in the previous solutions, I would advise you to start the problem with Fosc/4, move through the prescaler, and then onto the counter.
1 second 1000 ms 16 clk 2^16 counts
------------ * -------- * ------- * -----------
16*10^6 clks 1 second 1 count 1 roll-over
which comes out to 65.5 ms
---------
roll-over
When you solve these problems, it's important to verify that all the units, except those that you want, cancel. We will call the time required for the counter to go from 0 to 216 - 1 and then back to 0 the maximum period of the counter. Practice using the dimensional analysis technique to determine the maximum period (in milliseconds) for all the prescalers in the following table. The maximum periods for each prescaler are shown in a previous table and rounded to 3 significant figures. You will need this table to solve practical problems of interest like the following:
Some problems
- Question:How much time goes by in 30,00 counts with a 1:8
prescaler? State your answer in ms and round to 3 significant figures.
Answer:1 second 1000 ms 8 clk ------------ * -------- * ------- * 30,000 counts = 15ms 16*10^6 clks 1 second 1 count
- Question:Starting at 30,000, how long will it take TMR0 to
roll-over with a 1:8 prescaler?
State your answer in ms and round to 3 significant figures.
Answer: There are 216-30,000=35,536 counts until TMR0 rolls-over.1 second 1000 ms 8 clk 35,536 counts 17.8 ms ------------ * -------- * ------- * ------------- = --------- 16*10^6 clks 1 second 1 count roll over roll over
- Question:What starting value would result in TMR0 rolling over
in 100ms?
Answer: First, we need to select a prescaler for TMR0. Always select the smallest prescaler that has a Max Period greater or equal to the needed duration. In the case of a 100ms delay, we need a 1:32 prescaler. Next, we will call the tarting value of the TMR0, x. TRM0 has to count up from x to 216 in order to roll-over. This is a total of 2-x-x counts. This term is used int he solution to the problem.16*10^6 clks 1 second 1 count roll over ------------ * -------- * ------- * ---------- = 100 ms 1 second 1000 ms 32 clk 216-x solving for x yields, x = 15,536
- Question:An active low push button is connection to RA2, is
pressed for an unknown amount of time - except that we know that it
is not more than 200ms. Complete the program below to measure the number
of TMR0 counts of the button press.
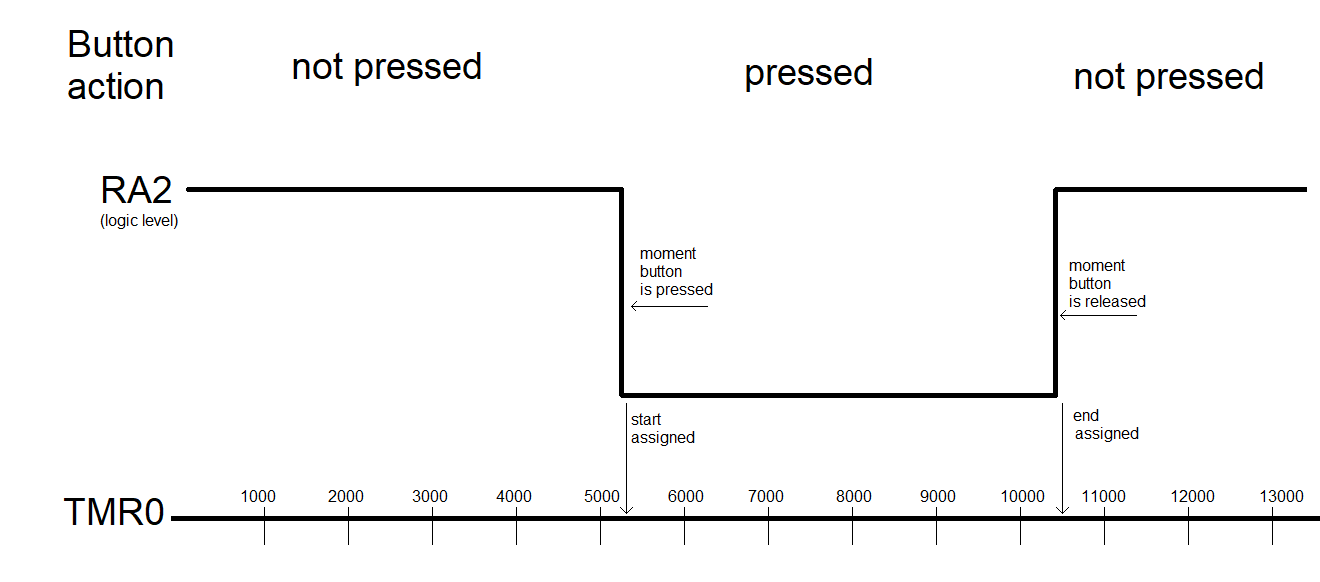
Answer: In our previous examples we assumed that the timer starts at 0. In this example we will compute the difference between two timer count values. In addition, we will assume that the push button starts in the unpressed state. Since this is an active low button, this means that you should assume that RA2 starts out at logic 1 as shown in the figure above.uint16_t start, end, duration; T0CONbits.T0PS = 0bxxx; // It's your job to determine xxx T0CONbits.PSA = 0; T0CONbits.TMR0ON = 1; // Turn on timer 0 while(PORTAbits.RA2 == 1); // Wait for the start of pulse on RA0 start = TMR0; while(PORTAbits.RA2 == 0); // Wait for the pulse to end on PTT0 end = TMR0; duration = end - start;
Let's start our discussion by determining the prescaler. Looking at your maximum period table, you should look for prescalers that can accommodate the range pulse duration in the maximum period. In our case this means that we should select prescaler starting from 1:16 because the maximum period for a 1:16 prescaler is 65.5 ms which can accommodate a 50 ms pulse. You could also select from 1:32 to 1:256 prescalers to measure the pulse. However we will employ the general rule that when ever you have a choice of prescalers, use the smallest to get the best timing resolution. Hence the program above should use a 1:16 prescaler, or T0CONbits.T0PS = 0b011;
On initial inspection the code is straight forward; start = TMR0; is executed when the while (PORTAbits.RA2 == 1); while-loop exits. This means that the RA2 pin was at a logic 1 and now at logic 0, the falling edge of pulse on RA2. The instruction, end = TMR0; is executed when the while (PORTAbits.RA2 == 0); while-loop exits. This means that the RA2 pin was at a logic 0 and now at logic 1, the rising edge of pulse on RA2.
On first glance you might assume that the end count is always greater than the start count. If this were true then it should be obvious that the statement difference = end - start; gives us the duration of the pulse in timer counts. Before examining our assumption further, I need to make an important point: times measured by the timer subsystem are not represented in the normal time-units we are familiar with like milliseconds. You would need to write some code to convert the timer counts into "normal" units. Most of the time, we will have our program output the raw timer counts and rely on the person examining the output to convert from timer counts to familiar time units like milliseconds.
Now let's return to that assumption, "the end count is always greater than the start count". This is a flawed assumption because the timer could roll over between the start of the pulse and the end. This would result in the end count being smaller than the start count. It would be normal to assume that this would cause the difference = end - start; statement to produce the wrong answer. The truth is a little surprising; the difference between an end and start time is not affected by a timer roll-over. We can prove this by borrowing from the definition of the 2's complement.
Imagine that the timer rolled-over during the pulse's duration so that end < start. Since subtraction is equivalent to addition of the 2's complement we can re-write difference = end - start; as difference = end + (216 - start);. We will analyze this expression and show that it accurately reflects the number of timer counts between the positive and negative edges of our pulse.
The second term in this statement (216 - start) is just the number of timer counts from the start of the pulse until the timer rolls-over (the timer rolls over when it gets to 216. The term end is just the number of timer counts from 0. This sum describes exactly what happened when the counter rolled-over. Consequently, the difference between the end and start times accurately describes the number of timer counts regardless of an intervening timer roll-over.
-
Question:How many 1:16 prescaled TMR0 counts go by during 50 ms?
Answer:1 second 1000 ms 16 clk ------------ * -------- * ------- * x counts = 50 ms 16*10^6 clks 1 second 1 count x = 50,000 counts -
Question: How many times would TMR0 rollover in 100 seconds with
a 1:128 prescaler?
Answer:16*10^6 clks 1 count 1 rollover ------------ *------- * ---------- * 100 s = 190.7 rollovers 1 second 128 clk 216 counts So 190 roll overs.
-
Question:
Starting at 0, what value would be stored in TMR0 after 450ms running with
a 1:4 prescaler?
Answer: TMR0 will roll over because TMR0 only requires 16.4ms to roll over. So my first step in this problem is to compute how many times TMR0 rolls over.16*10^6 clks 1 second 1 count 1 rollover ------------ * -------- * ------- * ---------- * 450 ms = 27.466 rollovers 1 second 1000 ms 4 clk 216 countsFrom this we know that TMR0 will count up from 0 to 216-1 27 times with 0.466 of a roll over left over. The second part of the problem will convert this 0.466 roll overs into counts.216 counts ---------- * 0.466 rollovers = 30,528 counts 1 rollversSo, starting at 0, TMR0 will end up at 30,528. Note that when I computed the number of roll overs, my fractional result contined many more digits which I retained when performing the second calculation. This is why come of you get a marginally different answer when you multiply 216*0.466.
Test your understanding
You can find the solutions embedded in the "source code" for this web page by right mouse clicking on this web page and selecting "view source". The solutions are in HTML comments.- With an 1:8 prescaler and an initial value of 0x1234, how long does it take the counter to reach 0xABCD?
- With an 1:8 prescaler and an initial value of 0xABCD, how long does it take the counter to reach 0x1234?
- You are running the following code-snippet. Assuming that
TMR0 = 0x1234, how long does it take
to exit from the while-loop? State your answer in milliseconds.
T0CONbits.T0PS = 0b101; T0CONbits.TMR0ON = 1; INTCONbits.T0IF = 0; while(INTCONbits.T0IF == 0); - You have been asked to rank the number of times each line
of code in the following program is executed. This algorithm (introduced
earlier in this lecture) measures the duration of short (< 50 ms) logic
low pulses on pin RA2. You are examining the following code over 1
second, during which there was a single 30 ms logic low pulse.
for (;;) { 1. while(PORTAbits.RA2 == 1); 2. start = TMR0; 3. while(PORTAbits.RA2 == 0); 4. end = TMR0; 5. duration = end - start; } // end infinte loop- Rank the lines of code, from most executed to least execute.
- If each line of code takes 1us to execute, provide an estimate of the number of us spent (over a 1 second period) executing each instruction.